Research
My research lies broadly in unconventional computation, especially in mathematical models inspired by chemistry, thermodynamics, self-organization, and distributed control. I am interested in how ideas from computational complexity, information theory, thermodynamics, and the theory of computation can be used to understand the expressive power of abstract systems that resemble natural processes. Much of my work centers on molecular computing, algorithmic self-assembly, and robot motion planning.
Chemical Reaction Networks (CRNs)
Chemical Reaction Networks (CRNs) are abstract mathematical models of interacting chemical species, where reactions transform multisets of molecules over time. They provide a clean framework for studying molecular computation, distributed algorithms, and dynamical systems within a common formal language. Depending on the setting, CRNs can be viewed as stochastic chemical processes, deterministic population-level systems, or count-based computational devices. My work studies the expressive power of CRNs and related variants, with particular emphasis on efficient simulation between models, the complexity of reachability and termination, and the effect of restricting reaction rules.
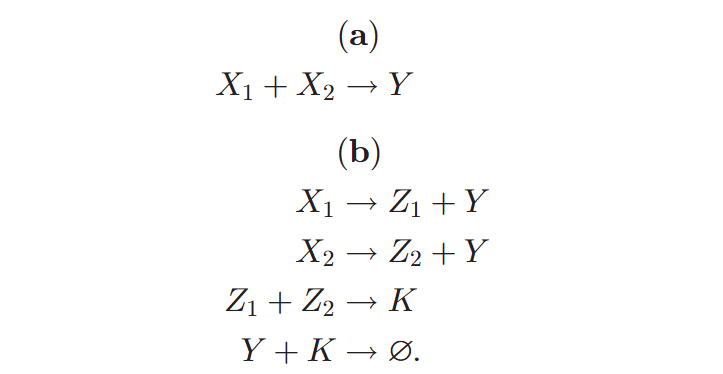
Figure from or adapted from: Composable Rate-Independent Computation in Continuous Chemical Reaction Networks
Selected papers
Thermodynamic Binding Networks (TBNs)
Thermodynamic Binding Networks (TBNs) are equilibrium models of molecular systems that focus on which assemblies are energetically favored, rather than the order in which they form. In a TBN, monomers bind through complementary domains to form polymers, and stable outcomes are determined by the competition between enthalpy, which favors additional bonds, and entropy, which favors larger numbers of separate complexes. This makes TBNs a useful abstraction for reasoning about self-organization and DNA nanotechnology at thermodynamic equilibrium. My work investigates the expressive limits of TBNs, the complexity of predicting stable and reachable configurations, and their relationship to more abstract thermodynamic models such as Thermodynamic Affinity Networks.
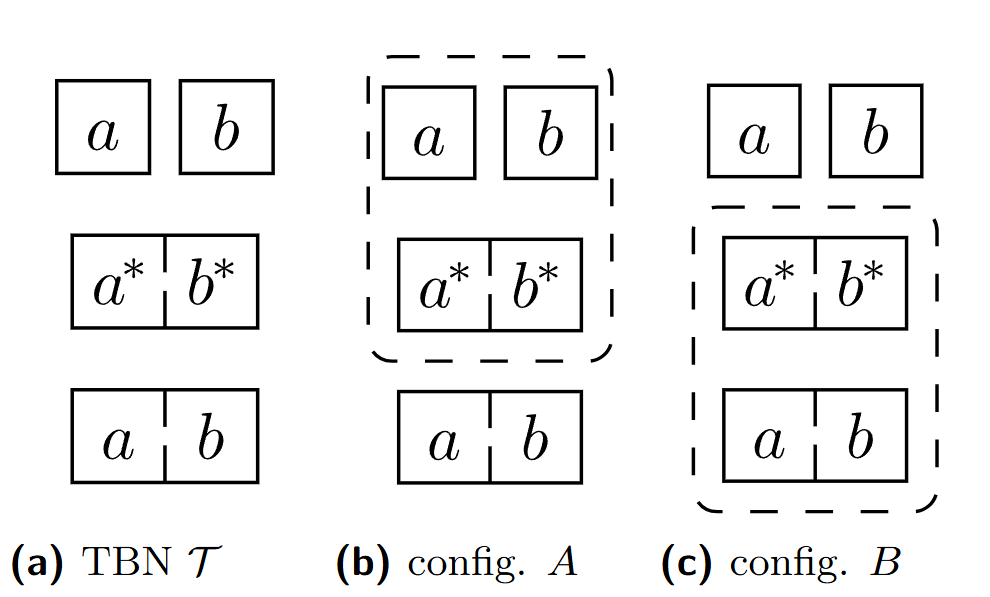
Figure from or adapted from: Brief Announcement: Barrier-1 Reachability for Thermodynamic Binding Networks is PSPACE-complete
Tile Self-Assembly
Tile self-assembly studies how simple components with local binding rules can spontaneously organize into larger structures without centralized control. In these models, tiles act as programmable units whose compatible edges determine how assemblies grow, allowing geometry and computation to emerge from local interactions alone. Inspired by DNA tile nanotechnology, this area connects algorithm design, distributed computation, and the mathematics of shape formation. My work in tile self-assembly explores the power and limitations of various assembly models, including systems with repulsion, temperature changes, and signal passing, as well as how these models can build shapes or simulate other forms of computation.
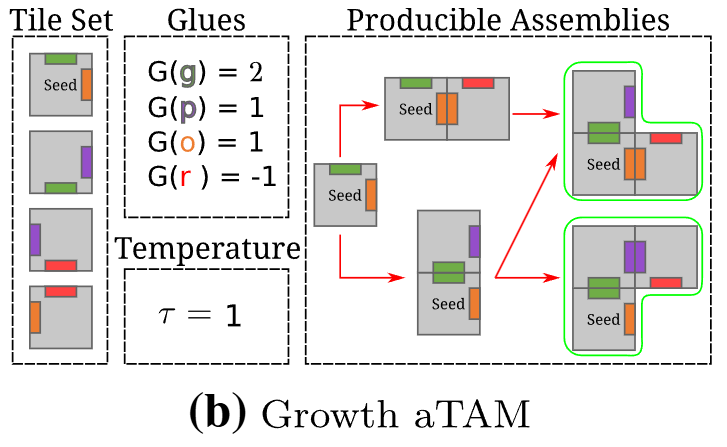
Figure from or adapted from: Covert Computation in Self-Assembled Circuits
Selected papers
- Self-assembly of Shapes at Constant Scale Using Repulsive Forces UCNC 2017 / Natural Computing 2019
- Self-Assembly of Any Shape with Constant Tile Types using High Temperature ESA 2018
- Signal Passing Self-Assembly Simulates Tile Automata ISAAC 2020
Robot Motion Planning
My work on robot motion planning focuses on highly constrained settings where large numbers of simple robots move under uniform global control signals rather than independent commands. In these models, every robot receives the same instruction at the same time, so geometry, obstacles, and swarm interactions determine what collective behaviors are possible. These systems are motivated by applications in microrobotics, programmable matter, and large-scale swarm control, and they raise natural questions about reachability, relocation, reconfiguration, and computational hardness. My research studies both the algorithmic possibilities and the complexity-theoretic limitations of such globally controlled robotic systems.
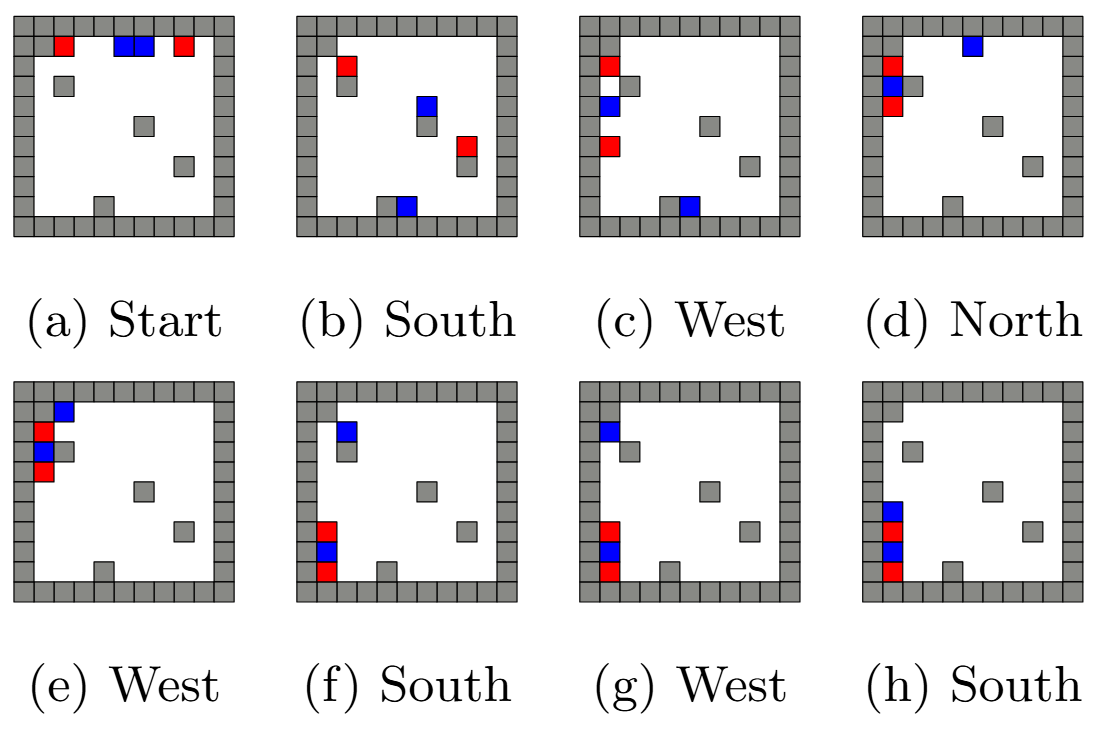
Figure from or adapted from: Uniform Robot Relocation is Hard in Only Two Directions Even Without Obstacles
Selected papers
Collaborators
I have been fortunate to collaborate with researchers and students across molecular computing, self-assembly, algorithms, and swarm motion planning, including Jose Balanza-Martinez, Keenan Breik, David Caballero, Angel Adrian Cantu, Cameron Chalk, David Doty, Luis Angel Garcia, Timothy Gomez, Arturo Gonzalez, Sarfraz Khurshid, Cesar Lozano, Eric Martinez, Fernando Martinez, Eduardo Medina, Arnoldo Ramirez, Rene Reyes, Robert Schweller, David Soloveichik, Marko Vasic, Andrew Winslow, and Tim Wylie.