![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
We consider the Korteweg-de Vries-Burgers equation
with
In our paper we prove that the following nonlinear boundary control stabilizes (1)-(2)
It is clear that, since (4) and (5) are invertible functions, this control law can be implemented via any of the following three variables at the 1-boundary:
In order to formulate our problem as an abstract initial value problem we consider Hilbert spaces
| (6) |
and domain
With the above notation our system (1), (2), (3)-(5) can be written in the form of
Our main result is formulated in the following theorem.
Theorem : For any initial data
 system (7) possesses a unique solution
system (7) possesses a unique solution
 with
with
- Global exponential stability in the
 -sense:
-sense:
- Global asymptotic and semi-global exponential stability in the
 -sense:
there exist
-sense:
there exist  such that for any
such that for any


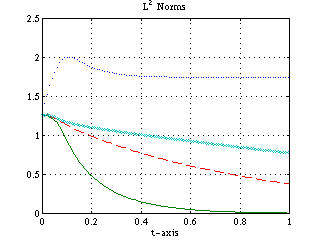
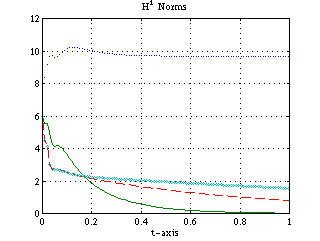
The proof can be found in our paper. Simulation Example
The following numerical simulation shows that our control law (3)-(5)
achieves faster convergence than the control law
| (10) | |||
| (11) | |||
| (12) |
and an improved version of it
proposed by Liu and Krstic. A comparison is also made relative to the uncontrolled system consisting of the KdVB equation (1) and the boundary conditions
| (16) |
Click on the images to see animation!
|  |
| (a) Uncontrolled | (b) Second Derivative Controlled (Quadratic) |
|  |
| (c) Second Derivative Controlled (Cubic) | (d) Two Derivatives Controlled |